标定工具的使用¶
介绍¶
1.1 支持平台¶
目前标定工具只支持了 Ubuntu 16.04 LTS 上的发布。但有支持官方、ROS多版 OpenCV 依赖。
平台 |
架构 |
不同依赖 |
|---|---|---|
Ubuntu 16.04 LTS |
x64(amd64) |
libopencv-dev |
Ubuntu 16.04 LTS |
x64(amd64) |
ros-kinetic-opencv3 |
1.2 工具包说明¶
Ubuntu 上提供的是 deb/ppa 安装包,名称上会区分架构、依赖和版本。如下:
mynteye-s-calibrator-opencv-official-1.0.0_amd64.deb
mynteye-s-calibrator-opencv-ros-kinetic-1.0.0_amd64.deb
其中,
依赖标识 |
依赖包名 |
详细说明 |
|---|---|---|
opencv-official |
libopencv-dev |
|
opencv-ros-kinetic |
ros-kinetic-opencv3 |
1.3 deb 工具包获取¶
获取方式 |
获取地址 |
|---|---|
百度网盘 |
|
Google Drive |
https://drive.google.com/open?id=1RsV2WEKAsfxbn-Z5nGjk5g3ml1UDEsDc |
安装¶
2.1 安装准备¶
Ubuntu 16.04 LTS 环境,x64 架构
标定工具的 deb 包,按需选择 OpenCV 依赖 (PPA安装不需要此步)
2.2 安装 ppa 包¶
$ sudo add-apt-repository ppa:slightech/mynt-eye-s-sdk
$ sudo apt-get update
$ sudo apt-get install mynteye-s-calibrator
$ sudo ln -sf /opt/myntai/mynteye-s-calibrator/mynteye-s-calibrator /usr/local/bin/ mynteye-s-calibrator
2.3 安装 deb 包¶
sudo dpkg -i 即可安装 deb 包。如下:
$ sudo dpkg -i mynteye-s-calibrator-opencv-official-1.0.0_amd64.deb
...
(Reading database ... 359020 files and directories currently installed.)
Preparing to unpack mynteye-s-calibrator-opencv-official-1.0.0_amd64.deb ...
Unpacking mynteye-s-calibrator (1.0.0) over (1.0.0) ...
Setting up mynteye-s-calibrator (1.0.0) ...
如果遇到了依赖包未安装的错误,例如:
$ sudo dpkg -i mynteye-s-calibrator-opencv-official-1.0.0_amd64.deb
Selecting previously unselected package mynteye-s-calibrator.
(Reading database ... 358987 files and directories currently installed.)
Preparing to unpack mynteye-s-calibrator-opencv-official-1.0.0_amd64.deb ...
Unpacking mynteye-s-calibrator (1.0.0) ...
dpkg: dependency problems prevent configuration of mynteye-s-calibrator:
mynteye-s-calibrator depends on libatlas-base-dev; however:
Package libatlas-base-dev is not installed.
dpkg: error processing package mynteye-s-calibrator (--install):
dependency problems - leaving unconfigured
Errors were encountered while processing:
mynteye-s-calibrator
可以继续执行 sudo apt-get -f install 完成安装,
$ sudo apt-get -f install
Reading package lists... Done
Building dependency tree
Reading state information... Done
Correcting dependencies... Done
The following additional packages will be installed:
libatlas-base-dev
Suggested packages:
libblas-doc liblapack-doc
The following NEW packages will be installed:
libatlas-base-dev
0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
1 not fully installed or removed.
Need to get 3,596 kB of archives.
After this operation, 30.8 MB of additional disk space will be used.
Do you want to continue? [Y/n]
Get:1 http://cn.archive.ubuntu.com/ubuntu xenial/universe amd64 libatlas-base-dev amd64 3.10.2-9 [3,596 kB]
Fetched 3,596 kB in 3s (1,013 kB/s)
Selecting previously unselected package libatlas-base-dev.
(Reading database ... 358993 files and directories currently installed.)
Preparing to unpack .../libatlas-base-dev_3.10.2-9_amd64.deb ...
Unpacking libatlas-base-dev (3.10.2-9) ...
Setting up libatlas-base-dev (3.10.2-9) ...
update-alternatives: using /usr/lib/atlas-base/atlas/libblas.so to provide /usr/lib/libblas.so (libblas.so) in auto mode
update-alternatives: using /usr/lib/atlas-base/atlas/liblapack.so to provide /usr/lib/liblapack.so (liblapack.so) in auto mode
Setting up mynteye-s-calibrator (1.0.0) ...
使用¶
3.1 使用准备¶
MYNT EYE S 相机
棋盘格标定板
光照均匀的场景
3.2 使用命令¶
安装好标定工具后,在终端可直接运行 mynteye-s-calibrator 命令进行标定。 -h 可见其选项:
$ mynteye-s-calibrator -h
Usage: mynteye-s-calibrator [options]
help: mynteye-s-calibrator -h
calibrate: mynteye-s-calibrator -x 11 -y 7 -s 0.036
Calibrate MYNT EYE S device.
参数:
- -h, --help
显示帮助信息并退出
- -x WIDTH, --width=WIDTH
棋盘格宽, 默认: 11
- -y HEIGHT, --height=HEIGHT
棋盘格高, 默认: 7
- -s METERS, --square=METERS
棋盘格格子边长, 默认: 0.036
- -n NUMBER, --number=NUMBER
用于标定的图片张数, 默认: 11
- -p PATH, --path=PATH
保存结果的文件夹名, 默认: 相机SN名
-x -y -s 用于设定标定板的宽、高、格子大小。宽、高分别指棋盘格横纵向的黑白交叉点数。格子大小,单位是 m
3.3 使用步骤¶
首先,连接好 MYNT EYE S 相机。
然后,终端里运行 mynteye-s-calibrator <标定板参数> 命令,标定板参数需要根据使用的标定板来设置,参数说明见上
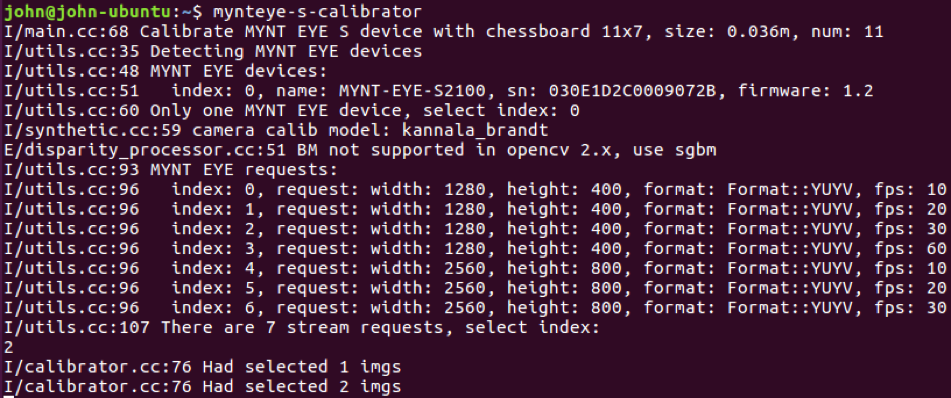
按提示选择相机某个分辨率的 index ,进行此分辨率下的图像标定。
S1030相机只需要标定752*480分辨率。S2100 相机需要标定2560*800,1280*400两个分辨率。
标定时尽量让标定板铺满相机左右目图像,且照顾到四周(畸变最大)。标定工具会自动评估出合格的图像用于标定计算,在终端上会提示已选中了多少张。
参考的采集图像,如下:





注:p_x, p_y, size, skew 分别表示采集到图像时,标定板于x 轴、y轴、缩放、倾斜的比例。作一点参考用。
一旦达到标定需求采集的图像数目后,就会进行标定计算、输出结果。如下:

终端会打印出左右目的标定结果
标定结果会写进 SNXXX 目录的文件中
camera_left.yaml: 左目参数
camera_right.yaml: 右目参数
extrinsics.yaml: 双目外参
img.params.equidistant: 相机参数,可用于 S SDK 写入
stereo_reprojection_error.yaml: 重投影误差
最后,还会询问是否写入相机设备。回车或`y`即表示确认,
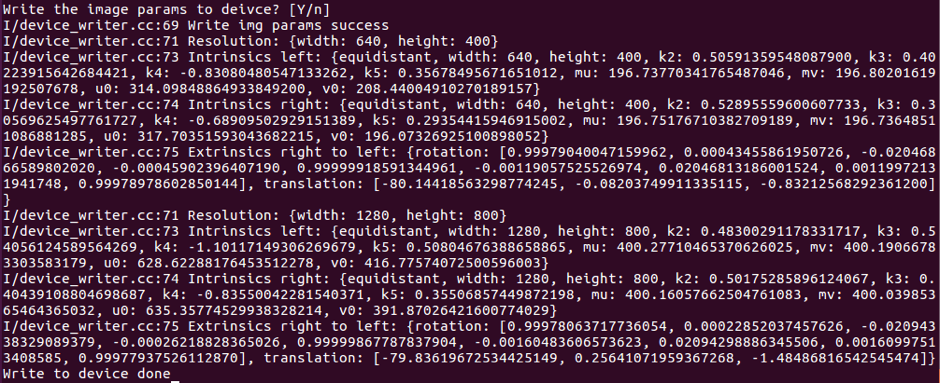
写入设备后,将提示“Write to device done”。
3.4 标定结果¶
标定结果,要求重投影误差最好能达到0.2或更低。如果超过1,需要重新标定。
重投影误差,可见标定完成后的输出“Final reprojection error: 0.201 pixels”,或者见标定结果文件“stereo_reprojection_error.yaml”。